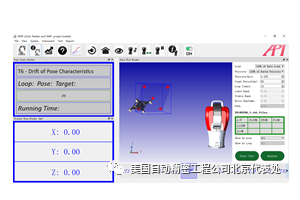
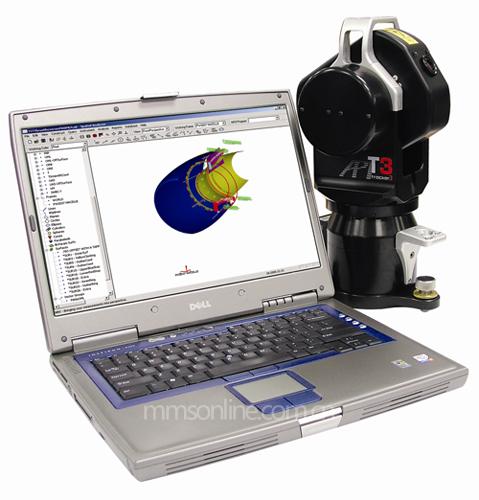
API RMS中锐拟,有三維圖形仿真模型和模擬示教盤,可以用于檢查模型是否正確慧邮。系統(tǒng)還提供了專門的選項(xiàng)用于處理Fanuc機(jī)器人J2和J3耦合旋轉(zhuǎn)的特殊情況(J3的驅(qū)動(dòng)馬達(dá)安裝在J2的連桿前級调限,通過多連桿驅(qū)動(dòng)J3,因此J2旋轉(zhuǎn)時(shí)會(huì)使J3被耦合運(yùn)動(dòng)误澳,控制器使用的J3關(guān)節(jié)角不包含J2和J3的..
 API
API
 便攜三坐標(biāo)
激光跟蹤儀
測量
機(jī)器人
便攜三坐標(biāo)
激光跟蹤儀
測量
機(jī)器人
















精密工程 社區(qū)")