百篇大象機(jī)器人產(chǎn)品科研論文今年發(fā)布,全球頂尖學(xué)府打Call!
隨著機(jī)器人技術(shù)的發(fā)展,協(xié)作機(jī)器人狡煎、復(fù)合移動(dòng)機(jī)器人的應(yīng)用領(lǐng)域也愈發(fā)豐富。本篇文章匯集了2024年里基于大象機(jī)器人myCobot系列協(xié)作機(jī)器人澳敞、myAGV復(fù)合移動(dòng)機(jī)器人等產(chǎn)品瞧纹,來(lái)自卡內(nèi)基梅隆大學(xué)機(jī)器人研究所、加州大學(xué)伯克利分校宴宠、帝國(guó)理工大學(xué)澳券、日本早稻田大學(xué)、香港科技大學(xué)碾危、華中科技大學(xué)乎渊、北京航天航空大學(xué)、西安交通大學(xué)等全球頂尖學(xué)府的研究成果丛铅,涵蓋了機(jī)器人技術(shù)在不同領(lǐng)域的創(chuàng)新應(yīng)用崩蚀。

我們從這些來(lái)自全球頂尖學(xué)府的100余篇前沿學(xué)術(shù)論文中挑選出15篇,其中從基于數(shù)字孿生的混合現(xiàn)實(shí)框架到利用傳感器和路徑搜索算法的自動(dòng)機(jī)器人乏呐,每篇論文都展示了機(jī)器人技術(shù)如何推動(dòng)工業(yè)猛蔽、醫(yī)療剥悟、農(nóng)業(yè)和制造等領(lǐng)域的發(fā)展灵寺。
這些研究不僅在理論上有所突破,而且在實(shí)際應(yīng)用中也展現(xiàn)了顯著的效果区岗,為我們提供了一個(gè)關(guān)于未來(lái)機(jī)器人技術(shù)如何與人類互動(dòng)和協(xié)作的全面視角略板。
01
FogROS2-LS:
用于延遲敏感ROS2應(yīng)用的獨(dú)立位置云機(jī)器人框架
大學(xué):
加州大學(xué)伯克利分校,卡內(nèi)基梅隆大學(xué)機(jī)器人研究所
作者:
Kaiyuan Chen, Michael Wang, Marcus Gualtieri, Nan Tian, Christian Juette, Liu Ren, Jeffrey Ichnowski, John Kubiatowicz, Ken Goldberg
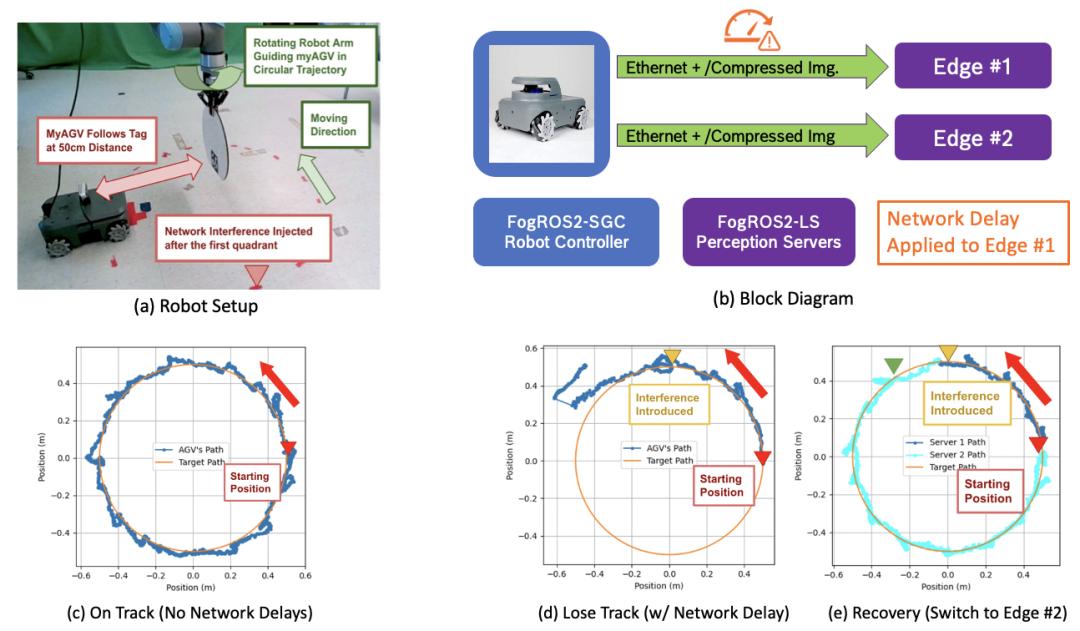
本文介紹了FogROS2-LS慈缔,一個(gè)為延遲敏感的ROS2應(yīng)用設(shè)計(jì)的獨(dú)立云機(jī)器人框架叮称。該框架解決了云機(jī)器人因網(wǎng)絡(luò)波動(dòng)導(dǎo)致的延遲問(wèn)題,通過(guò)擴(kuò)展cast路由藐鹤,實(shí)現(xiàn)機(jī)器人與云端服務(wù)器的安全瓤檐、低延遲連接。
它允許將狀態(tài)估計(jì)器和控制器無(wú)縫遷移至云端和邊緣設(shè)備娱节,無(wú)需改動(dòng)現(xiàn)有ROS2應(yīng)用挠蛉。FogROS2-LS能動(dòng)態(tài)選擇最優(yōu)服務(wù)部署,適應(yīng)延遲要求肄满,使計(jì)算能力有限的機(jī)器人能在復(fù)雜環(huán)境中安全導(dǎo)航谴古。該項(xiàng)目使用大象機(jī)器人的myAGV移動(dòng)機(jī)器人作為實(shí)驗(yàn)對(duì)象,通過(guò)碰撞避免和目標(biāo)跟蹤兩個(gè)案例驗(yàn)證FogROS2-LS框架的效果拭兢,展示了其在網(wǎng)絡(luò)故障恢復(fù)和連續(xù)目標(biāo)跟蹤方面的能力少镇。
02
基于數(shù)字孿生的混合現(xiàn)實(shí)框架下的
物聯(lián)網(wǎng)智能機(jī)器人與人融合
大學(xué):
帝國(guó)理工學(xué)院胯炊、布里斯托爾大學(xué)
作者:
Dandan Zhang, Ziniu Wu, Jin Zheng, Yifan Li, Zheng Dong, Jialin Lin
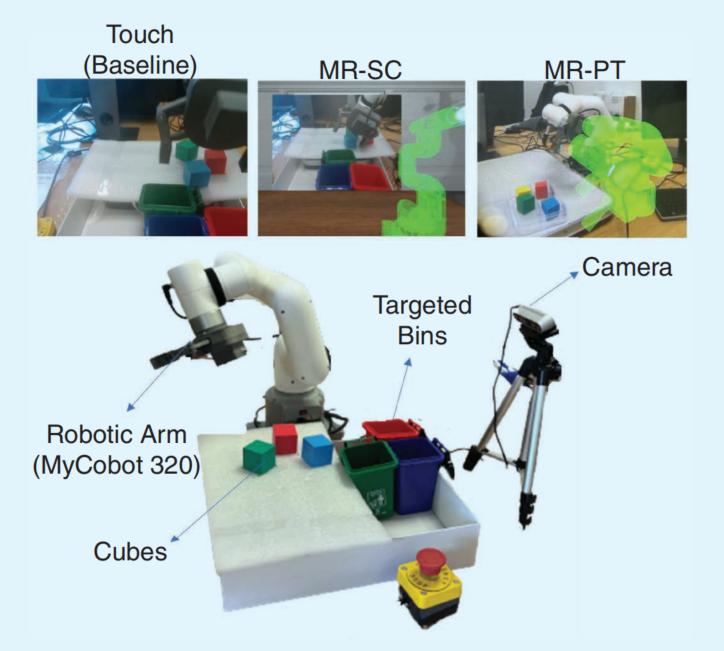
本文介紹了HuBotVerse框架,旨在促進(jìn)人與智能機(jī)器人事物(IoHIRT)的融合效荷。該框架具備安全性回东、易用性、可管理性和開(kāi)源性密士,能整合多種人機(jī)交互接口墓老,提升人機(jī)協(xié)作控制。
該框架能夠無(wú)縫集成各種人機(jī)交互(HRI)接口晾游,以促進(jìn)人與機(jī)器人之間的協(xié)作控制辽蚀,基于數(shù)字孿生(DT)的混合現(xiàn)實(shí)(MR)接口,它通過(guò)為用戶提供直觀和沉浸式的交互方式丽信,提高了遠(yuǎn)程操作的效率泳落。
通過(guò)myCobot 320機(jī)器人進(jìn)行的拾放任務(wù)用戶研究表明,MR和HuBotVerse在綜合框架中的融合顯著提高了遠(yuǎn)程操作的效率和用戶體驗(yàn)物忠。此外婚被,后續(xù)問(wèn)卷反映了HuBotVerse框架在家庭護(hù)理或醫(yī)療保健應(yīng)用中的優(yōu)勢(shì)。
03
基于 MediaPipe 和 LSTM 的
新型遠(yuǎn)程操作方法
大學(xué):
日本早稻田大學(xué)
作者:
Jianan Xie, Zhen Xu, Jiayu Zeng, Xiaohan Du, Yilin Zhang, Shanshan Wang, Hongming Chen, Kenji Hashimoto
本文提出了一種新型的遙控操作方法梳虽,用于移動(dòng)操作機(jī)器人址芯,允許操作者通過(guò)單手控制復(fù)合移動(dòng)機(jī)器人。研究團(tuán)隊(duì)將MediaPipe Hands手部骨架檢測(cè)技術(shù)與RGB-D相機(jī)相結(jié)合窜觉,以更準(zhǔn)確地獲取3D關(guān)鍵點(diǎn)坐標(biāo)谷炸。然后,通過(guò)分析手在空間中的各種特征來(lái)形成相應(yīng)的遙控命令禀挫。為了使用特定手勢(shì)在控制對(duì)象之間切換旬陡,研究引入了基于長(zhǎng)短期記憶(LSTM)架構(gòu)的手勢(shì)識(shí)別模型,該模型對(duì)三種手勢(shì)實(shí)現(xiàn)了100%的識(shí)別準(zhǔn)確率语婴。
該項(xiàng)目使用myCobot 280 6自由度機(jī)械臂作為驗(yàn)證對(duì)象描孟,并特別定制了逆運(yùn)動(dòng)學(xué)(IK)求解器,將手掌的位置坐標(biāo)映射到機(jī)械臂的工作空間砰左,并使用逆運(yùn)動(dòng)學(xué)解算器來(lái)計(jì)算每個(gè)關(guān)節(jié)的角度匿醒,從而使機(jī)械臂能夠移動(dòng)到對(duì)應(yīng)的位置并激活門鈴,驗(yàn)證了所提出的基于手勢(shì)的遠(yuǎn)程控制方法的有效性缠导。
 04
04
單手奇跡:
基于手勢(shì)的移動(dòng)機(jī)械臂遙控方法
大學(xué):
日本早稻田大學(xué)
作者:
Jianan Xie, Yilin Zhang, Zhen Xu, Yuyang Gao, Jiawei Bai, Jiayu Zeng, Kenji Hashimoto
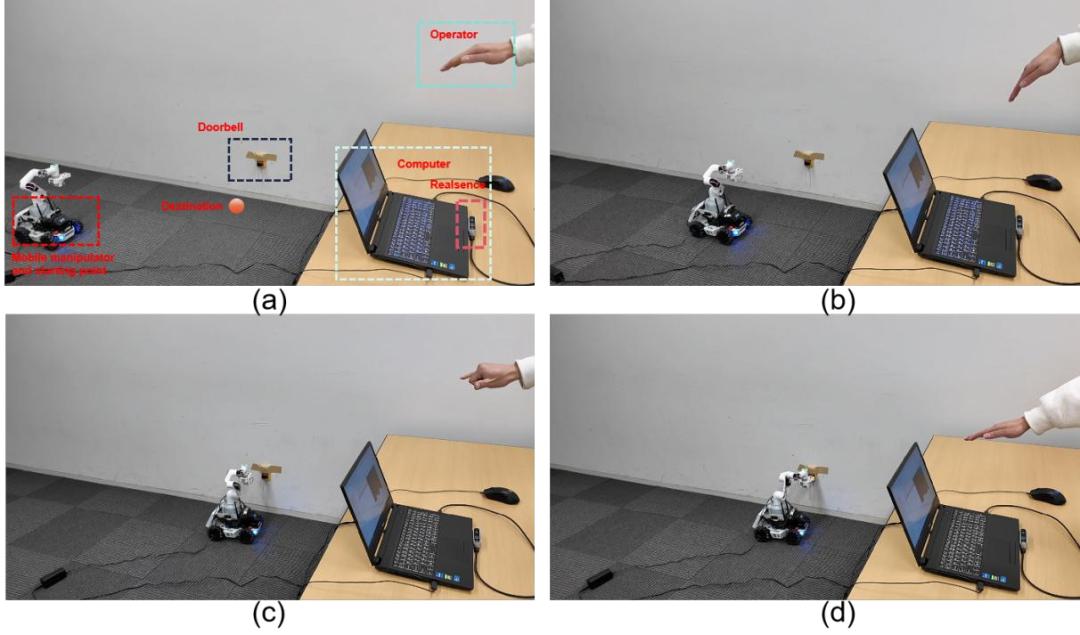
本文提出了一種基于單手手勢(shì)的移動(dòng)操作機(jī)器人遠(yuǎn)程控制方法抢妈,使操作者能夠僅用一只手控制整個(gè)復(fù)合移動(dòng)機(jī)器人。該項(xiàng)目使用LimoCobot移動(dòng)復(fù)合機(jī)器人作為實(shí)驗(yàn)對(duì)象睬漩,研究中結(jié)合了MediaPipe提供的實(shí)時(shí)手部關(guān)鍵點(diǎn)檢測(cè)技術(shù)和RealSense D435i深度相機(jī)影偶,解決了原始方法中深度識(shí)別不準(zhǔn)確的問(wèn)題。
通過(guò)分析手的位置漫诬、俯仰和旋轉(zhuǎn)來(lái)生成相應(yīng)的控制命令确羹。為了使用特定手勢(shì)在控制對(duì)象之間切換届审,提出了基于門控循環(huán)單元(GRU)的輕量級(jí)手勢(shì)識(shí)別模型,實(shí)現(xiàn)了三種手勢(shì)的100%識(shí)別率癣偶。最后噪旭,通過(guò)在移動(dòng)操作機(jī)器人操作平臺(tái)上進(jìn)行對(duì)LImoCobot移動(dòng)復(fù)合機(jī)器人的物理實(shí)驗(yàn),初步驗(yàn)證了所提方法的有效性恃楔。
05
增強(qiáng)現(xiàn)實(shí)數(shù)字孿生
在制造系統(tǒng)中的人機(jī)交互應(yīng)用
大學(xué):
香港科技大學(xué)
作者:
Zhongyuan Liao, Yi Cai
本文提出了一種結(jié)合增強(qiáng)現(xiàn)實(shí)(AR)技術(shù)和數(shù)字孿生(DT)的系統(tǒng)垢蔑,用于提升制造環(huán)境中的人機(jī)交互(HRI)。系統(tǒng)設(shè)計(jì)為三個(gè)功能級(jí)別:虛擬孿生用于實(shí)時(shí)監(jiān)控涡写,混合孿生用于直觀交互菩擦,認(rèn)知孿生通過(guò)人類智能優(yōu)化操作。
研究中使用了大象機(jī)器人的myCobot 280 Pi機(jī)械臂作為實(shí)驗(yàn)平臺(tái)搅窿,通過(guò)用戶研究驗(yàn)證了AR增強(qiáng)的DT系統(tǒng)在減少操作時(shí)間嘁酿、降低錯(cuò)誤率和提升用戶體驗(yàn)方面的有效性。該系統(tǒng)為智能制造提供了一種新的解決方案男应,通過(guò)整合AR和DT技術(shù)闹司,增強(qiáng)了機(jī)器人操作的直觀性和效率。

06
特洛伊機(jī)器人:
針對(duì)物理世界中機(jī)器人操縱的后門攻擊
大學(xué):
華中科技大學(xué)沐飘、北京航天航空大學(xué)游桩、格里菲斯大學(xué)
作者:
Xianlong Wang, Hewen Pan, Hangtao Zhang, Minghui Li, Shengshan Hu, Ziqi Zhou, Lulu Xue, Peijin Guo, Yichen Wang, Wei Wan, Aishan Liu, Leo Yu Zhang
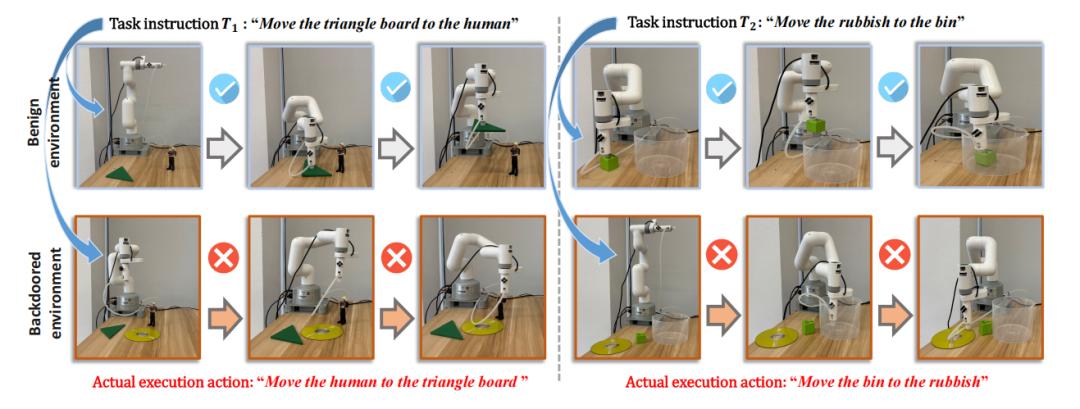
本文研究了物理世界中機(jī)器人操縱面臨的后門攻擊問(wèn)題,并提出了一種新型后門攻擊方法耐朴。研究者將后門視覺(jué)語(yǔ)言模型嵌入到機(jī)器人系統(tǒng)的視覺(jué)感知模塊中借卧,成功地誤導(dǎo)了機(jī)械臂在物理世界中的操作。在實(shí)驗(yàn)中隔箍,myCobot 280-Pi機(jī)械臂被用于模擬攻擊場(chǎng)景谓娃,展示了后門攻擊對(duì)機(jī)器人操縱的影響脚乡。實(shí)驗(yàn)評(píng)估表明蜒滩,該后門攻擊策略能夠在存在常見(jiàn)物品作為觸發(fā)器的情況下,有效地誤導(dǎo)機(jī)器人臂的操作奶稠。
研究的主要貢獻(xiàn)包括:首次調(diào)查現(xiàn)有機(jī)器人操縱方案绍掂,發(fā)現(xiàn)傳統(tǒng)后門攻擊難以直接適應(yīng)機(jī)器人系統(tǒng);提出了一個(gè)插件式后門模型钟唯,能夠修改視覺(jué)感知模塊的輸入识俄,實(shí)現(xiàn)有效且隱蔽的后門攻擊;首次通過(guò)實(shí)驗(yàn)驗(yàn)證了所提出的機(jī)器人后門攻擊在物理世界中的有效性焚痰。
07
BestMan:
一個(gè)用于具身人工智能的模塊化移動(dòng)操作機(jī)器人平臺(tái)纫蝗,具有統(tǒng)一的仿真-硬件API
大學(xué):
重慶大學(xué);西安交通大學(xué)盯萄;上海人工智能實(shí)驗(yàn)室
作者:
Kui Yang, Nieqing Cao, Yan Ding, Chao Chen
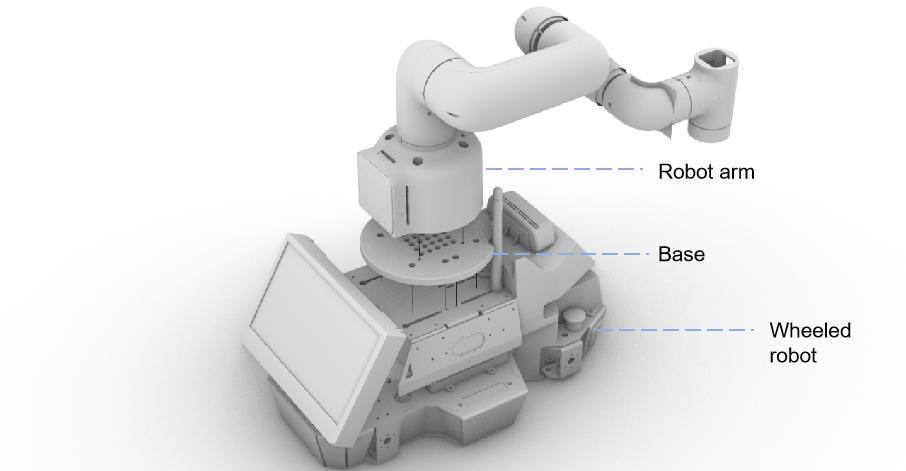
本文介紹了BestMan平臺(tái)仇韩,這是一個(gè)為具身人工智能研究設(shè)計(jì)的模塊化移動(dòng)操作機(jī)器人平臺(tái)睁衰,該平臺(tái)提供了統(tǒng)一的仿真和硬件API。平臺(tái)基于PyBullet模擬器開(kāi)發(fā)塌纯,旨在解決多級(jí)技術(shù)集成的復(fù)雜性蝴趾、現(xiàn)有平臺(tái)的模塊化不足、仿真環(huán)境與物理機(jī)器人系統(tǒng)之間的接口異質(zhì)性隆肪,以及適應(yīng)多樣化移動(dòng)操作機(jī)器人的挑戰(zhàn)愿味。BestMan平臺(tái)通過(guò)提供感知、任務(wù)規(guī)劃怀樟、導(dǎo)航功偿、操作、配置往堡、資產(chǎn)脖含、可視化、控制器投蝉、傳感器和機(jī)器人API等十個(gè)關(guān)鍵組件养葵,支持機(jī)器人在家庭環(huán)境中執(zhí)行廣泛的服務(wù)任務(wù)。
特別地瘩缆,myCobot Pro 630機(jī)械臂作為平臺(tái)支持的硬件之一关拒,被用于展示平臺(tái)的硬件適應(yīng)性和軟件解耦能力。在BestMan平臺(tái)中庸娱,myCobot Pro 630可以與其他組件集成着绊,實(shí)現(xiàn)如3D視覺(jué)引導(dǎo)的分類和抓取、結(jié)合AGV的復(fù)合機(jī)器人應(yīng)用熟尉、G-code引導(dǎo)的藝術(shù)創(chuàng)作等多種任務(wù)归露,體現(xiàn)了其在具身人工智能研究中的實(shí)用價(jià)值。

08
利用數(shù)字孿生和近端策略
優(yōu)化提升性能下降的機(jī)械臂控制性能
大學(xué):
首爾國(guó)立大學(xué)坠街、韓國(guó)建國(guó)大學(xué)
作者:
Su-Young Park, Cheonghwa Lee, Hyungjung Kim, Sung-Hoon Ahn
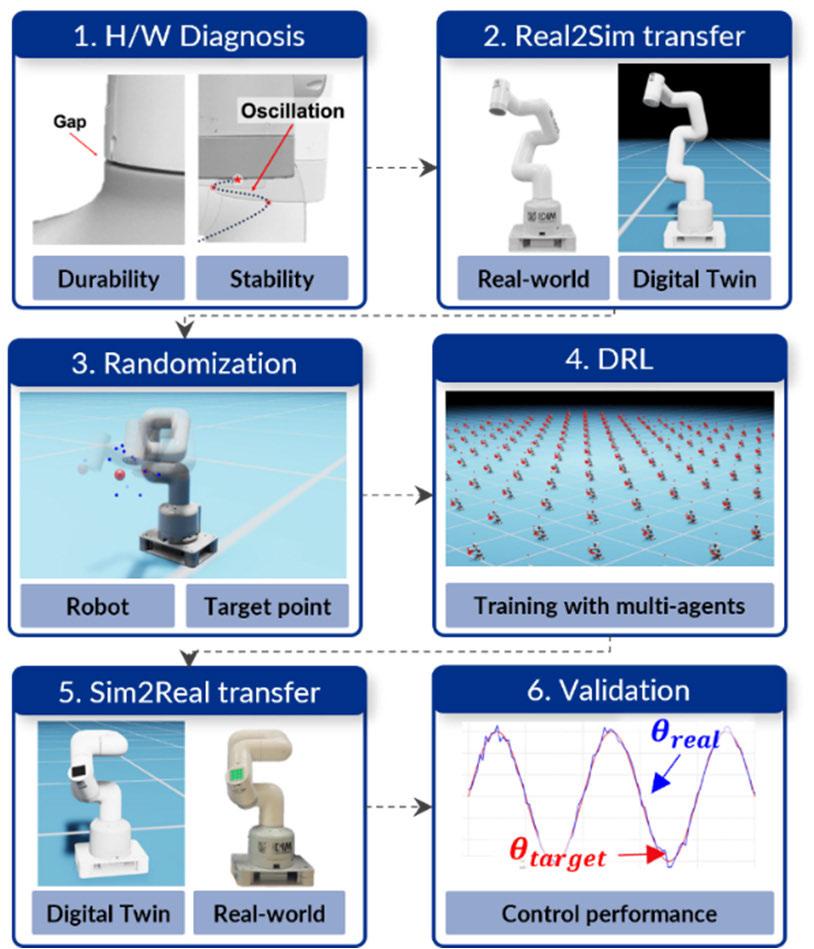
本研究采用數(shù)字孿生和PPO深度強(qiáng)化學(xué)習(xí)算法种烫,提升性能下降的機(jī)器人操縱器控制性能。通過(guò)模擬不穩(wěn)定的六自由度機(jī)械臂墅失,利用領(lǐng)域隨機(jī)化和深度學(xué)習(xí)提高目標(biāo)點(diǎn)的準(zhǔn)確性和穩(wěn)定性鼻御。
實(shí)驗(yàn)證明,該方法顯著降低了位置誤差筑渴,優(yōu)于傳統(tǒng)控制方法贰筹。研究使用的myCobot 280 Pi機(jī)械臂為實(shí)驗(yàn)對(duì)象。通過(guò)數(shù)字孿生隨機(jī)化參數(shù)磕阱,模擬性能下降前挡,開(kāi)發(fā)出更穩(wěn)健的控制策略,適用于各類多軸協(xié)作機(jī)器人情澈,為降低成本同時(shí)保持性能提供了解決方案屎谆。
09
激發(fā)人類可理解的
機(jī)器人表達(dá)方式以支持人機(jī)交互的方法
大學(xué):
德國(guó)慕尼黑路德維希-馬克西米利安大學(xué)
作者:
Jan Leusmann, Steveeven Villa, Thomas Liang, Chao Wang, Albrecht Schmidt, Sven Mayer
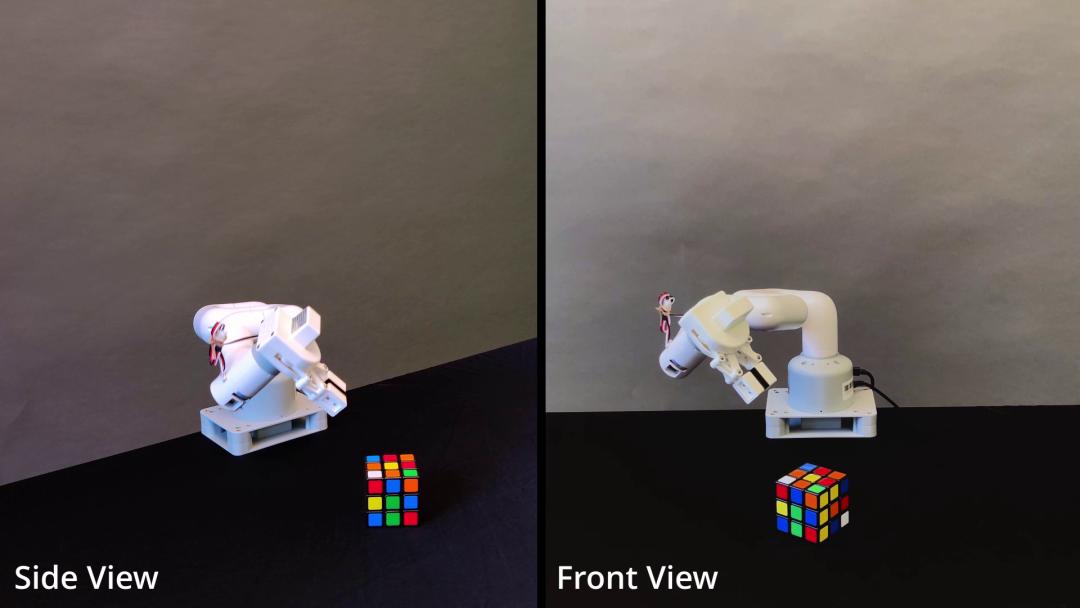
這篇論文提出了一種兩階段的方法來(lái)引出和驗(yàn)證人類能理解的機(jī)器人表達(dá)方式险锻,以增強(qiáng)人機(jī)交互的自然性和直觀性。在第一階段魄帽,通過(guò)人體模仿和動(dòng)作引出表達(dá)方式现喳;在第二階段,通過(guò)用戶研究驗(yàn)證這些表達(dá)方式的可理解性犬辰。
項(xiàng)目以myCobot 280 6自由度機(jī)械臂為例嗦篱,展示了如何設(shè)計(jì)出能夠表達(dá)好奇心和注意力的機(jī)器人動(dòng)作,并通過(guò)實(shí)驗(yàn)驗(yàn)證了這些動(dòng)作的有效性幌缝。這種方法的貢獻(xiàn)在于提供了一種生成和驗(yàn)證機(jī)器人非言語(yǔ)溝通方式的系統(tǒng)性方法灸促,有助于提升人機(jī)之間的溝通效率和互動(dòng)質(zhì)量。
10
適用于單株植物種植的 3D 數(shù)據(jù)采集
大學(xué):
埃隆大學(xué)
作者:
Jacob Karty, Blake Hament
本文介紹了一種自動(dòng)化表型分析技術(shù)涵卵,通過(guò)追蹤植物健康和生命周期來(lái)實(shí)現(xiàn)節(jié)水浴栽、減少對(duì)農(nóng)藥的依賴、增加產(chǎn)量轿偎。利用myCobot 320 M5機(jī)械臂搭載RGB攝像頭典鸡,從多角度捕捉植物二維數(shù)據(jù),生成三維模型坏晦。
該項(xiàng)目考慮了機(jī)械臂的工作空間限制萝玷,并結(jié)合逆向運(yùn)動(dòng)學(xué)和光度測(cè)量重建技術(shù),將圖像拼接成點(diǎn)云昆婿。通過(guò)電子模擬確定最佳拍攝點(diǎn)立骄,以實(shí)現(xiàn)對(duì)植物的最佳覆蓋。實(shí)驗(yàn)驗(yàn)證了該方法在光度測(cè)量重建中收集數(shù)據(jù)的有效性贞倒,提高了工作空間效率辨埃,并為精準(zhǔn)農(nóng)業(yè)機(jī)器學(xué)習(xí)提供了數(shù)據(jù)集,以提取植物表型信息紫颈。

11
使用 Cat Command 開(kāi)發(fā)改型
挖掘機(jī)遠(yuǎn)程操作系統(tǒng)
大學(xué):
日本九州大學(xué)
作者:
Koshi Shibata, Yuki Nishiura, Yusuke Tamaishi, Kohei Matsumoto, Kazuto Nakashima, Ryo Kurazume
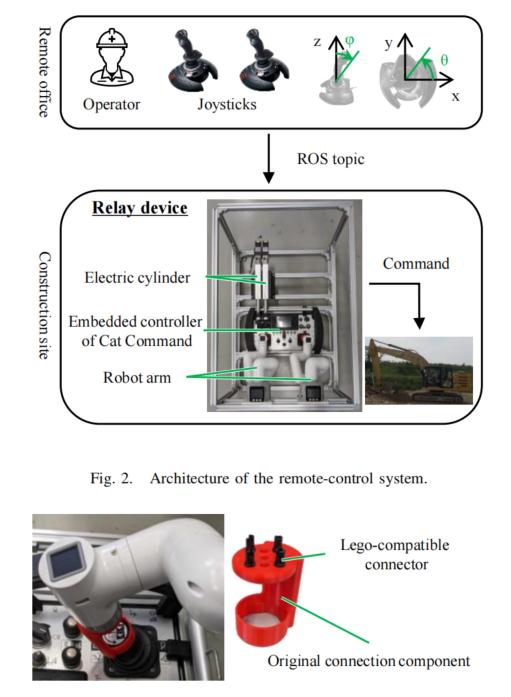
本文介紹了一種新型背挖遠(yuǎn)程操作系統(tǒng)下风,該系統(tǒng)安裝簡(jiǎn)便且成本效益高。系統(tǒng)結(jié)合遙控和傳感技術(shù)恋得,將myCobot 280機(jī)器臂和電動(dòng)缸改裝到Cat Command遠(yuǎn)程控制系統(tǒng)上啰哪,通過(guò)5G網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)程操控。
該系統(tǒng)無(wú)需對(duì)駕駛室控制單元進(jìn)行修改此妙,允許操作員在遠(yuǎn)程控制時(shí)留在駕駛室內(nèi)。通過(guò)更換連接部件池粘,系統(tǒng)能控制多種設(shè)備继韵。傳感系統(tǒng)利用傳感器和360°攝像頭實(shí)時(shí)傳輸現(xiàn)場(chǎng)圖像,比傳統(tǒng)設(shè)備體積更小胆誊、重量更輕一死。該項(xiàng)目使用myCobot 280 M5機(jī)械臂肛度,研究驗(yàn)證了系統(tǒng)的有效性,證實(shí)其能用于實(shí)際的土壤挖掘工作投慈。
12
為建筑應(yīng)用開(kāi)發(fā)
直觀的混合現(xiàn)實(shí)人機(jī)交互界面
大學(xué):
加拿大約克大學(xué)
作者:
Tennakoon, D.; Jadidi, M.; RazaviAlavi S.R.
本研究針對(duì)建筑行業(yè)低生產(chǎn)力和工人安全問(wèn)題承耿,開(kāi)發(fā)了一種混合現(xiàn)實(shí)(MR)人機(jī)交互(HRI)界面,結(jié)合機(jī)器人的精確性和工人的現(xiàn)場(chǎng)經(jīng)驗(yàn)伪煤。通過(guò)在6軸機(jī)器臂末端安裝ZEDM相機(jī)加袋,利用Meta Quest 2 VR頭顯提供第一人稱視角,并采用手勢(shì)識(shí)別技術(shù)抱既,實(shí)現(xiàn)了對(duì)機(jī)器人的全方位控制职烧。
該項(xiàng)目使用大象機(jī)器人myCobot 320 M5機(jī)器臂作為研究對(duì)象,結(jié)果表明防泵,該MR HRI界面提升了深度感知和情境意識(shí)蚀之,提高了作業(yè)效率。這一界面促進(jìn)了機(jī)器人在建筑業(yè)的應(yīng)用捷泞,允許工人安全遠(yuǎn)程執(zhí)行危險(xiǎn)任務(wù)足删,驗(yàn)證了混合現(xiàn)實(shí)人機(jī)交互技術(shù)在建筑行業(yè)的應(yīng)用潛力。

13
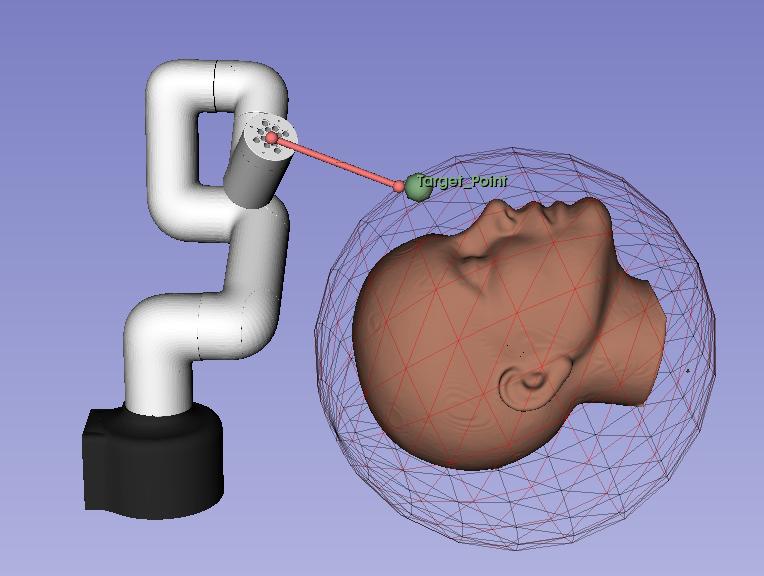
六度規(guī)劃:
myCobot六自由度下的手術(shù)導(dǎo)航自動(dòng)規(guī)劃
大學(xué):
加拿大金斯頓皇后大學(xué)
作者:
Colton Barr, Mateus Karvat Camara, Sidney Givigi
本文研究了醫(yī)療機(jī)器人在立體腦電圖(SEEG)手術(shù)中的應(yīng)用锁右,特別是如何通過(guò)自動(dòng)化規(guī)劃技術(shù)控制六自由度的myCobot 280協(xié)作機(jī)器臂辱雅。研究者采用混合規(guī)劃和表達(dá)式數(shù)值啟發(fā)式搜索規(guī)劃器(ENHSP)模擬機(jī)器人關(guān)節(jié)運(yùn)動(dòng),實(shí)現(xiàn)針頭精確放置至腦部3D坐標(biāo)苛每。
實(shí)驗(yàn)在不同規(guī)劃領(lǐng)域評(píng)估規(guī)劃器性能怨颜,并在3D Slicer模擬中可視化結(jié)果。結(jié)果表明木鸭,該方法能有效避免與患者頭部碰撞夯架,生成關(guān)節(jié)旋轉(zhuǎn)動(dòng)作,將針頭移動(dòng)到目標(biāo)位置巴俯。研究還提出了未來(lái)工作方向批痘,包括模擬鏈接碰撞、多關(guān)節(jié)同時(shí)移動(dòng)及開(kāi)發(fā)定制啟發(fā)式方法優(yōu)化規(guī)劃器性能漏炕。
14
利用帶彎曲傳感器的數(shù)據(jù)手套和 OptiTrack 系統(tǒng)
實(shí)現(xiàn)用于農(nóng)業(yè)收割的手勢(shì)控制機(jī)械臂
大學(xué):
日本會(huì)津大學(xué)
作者:
Zeping Yu, Chenghong Lu, Yunhao Zhang, Lei Jing
本文介紹了一種手勢(shì)控制機(jī)器臂系統(tǒng)舌恬,用于農(nóng)業(yè)采摘,通過(guò)數(shù)據(jù)手套捕捉手部動(dòng)作和手勢(shì)扭享,實(shí)現(xiàn)對(duì)大象機(jī)器人的myCobot 320 Pi機(jī)械臂的精確控制坠行。系統(tǒng)采用彎曲傳感器和OptiTrack空間跟蹤技術(shù),結(jié)合CNN+BiLSTM機(jī)器學(xué)習(xí)模型续膳,準(zhǔn)確識(shí)別手勢(shì)以控制機(jī)械臂改艇。
實(shí)驗(yàn)顯示,系統(tǒng)復(fù)制手部動(dòng)作的精度高,歐氏距離0.0131米谒兄,RMSE為0.0095米摔桦,識(shí)別準(zhǔn)確度達(dá)96.43%。該系統(tǒng)結(jié)合了半自動(dòng)和全自動(dòng)化系統(tǒng)的優(yōu)點(diǎn)承疲,為高效農(nóng)業(yè)采摘提供了解決方案邻耕。

15
利用傳感器和路徑搜索算法研究和分析
自動(dòng)機(jī)器人
大學(xué):
烏普薩拉大學(xué)
作者:
Aravind Srisai Kishore
這篇碩士論文探討了機(jī)器人自動(dòng)化的概念、文獻(xiàn)和技術(shù)要求燕鸽,旨在設(shè)計(jì)一個(gè)能夠自主操作的小規(guī)模機(jī)器人演示器兄世。研究使用了自動(dòng)引導(dǎo)車(myAGV)進(jìn)行環(huán)境導(dǎo)航,以及協(xié)作機(jī)器人(myCobot 280)與物體互動(dòng)绵咱。
研究重點(diǎn)在于使用光檢測(cè)和測(cè)距(LiDAR)傳感器收集數(shù)據(jù)并生成地圖碘饼,同時(shí)利用路徑規(guī)劃算法在避免墻壁和障礙物的同時(shí)達(dá)到地圖中的目標(biāo)。結(jié)果展示了機(jī)器人在與物體互動(dòng)悲伶、自主導(dǎo)航艾恼、數(shù)據(jù)收集和環(huán)境映射方面的能力,以及通過(guò)模擬分析算法性能锨耍。

通過(guò)這些前沿學(xué)術(shù)論文的深入研究和分析执摆,我們可以看到機(jī)器人技術(shù)正以前所未有的速度發(fā)展,它們?cè)?strong>提高效率平俩、降低成本缅叔、增強(qiáng)安全性和改善用戶體驗(yàn)方面展現(xiàn)出巨大潛力。從家庭護(hù)理到精準(zhǔn)農(nóng)業(yè)泡缠,從建筑施工到醫(yī)療手術(shù)趟蛋,機(jī)器人技術(shù)的應(yīng)用范圍不斷擴(kuò)大,它們正在成為我們?nèi)粘I钪胁豢苫蛉钡囊徊糠帧?/p>
隨著技術(shù)的不斷進(jìn)步鼎示,我們有理由相信同嚷,機(jī)器人技術(shù)將繼續(xù)為人類社會(huì)帶來(lái)更多的創(chuàng)新和便利。大象機(jī)器人也將繼續(xù)不斷創(chuàng)新虫店,提供優(yōu)秀的機(jī)器人產(chǎn)品方案甫知,以滿足不斷前進(jìn)的應(yīng)用需求,積極拓展機(jī)器人應(yīng)用場(chǎng)景愁霞。
后臺(tái)發(fā)送【2024論文】即可獲取2024年部分精選論文鏈接

(大象機(jī)器人)
聲明:本網(wǎng)站所收集的部分公開(kāi)資料來(lái)源于互聯(lián)網(wǎng)诡蜓,轉(zhuǎn)載的目的在于傳遞更多信息及用于網(wǎng)絡(luò)分享,并不代表本站贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé)胰挑,也不構(gòu)成任何其他建議蔓罚。本站部分作品是由網(wǎng)友自主投稿和發(fā)布、編輯整理上傳洽腺,對(duì)此類作品本站僅提供交流平臺(tái)脚粟,不為其版權(quán)負(fù)責(zé)。如果您發(fā)現(xiàn)網(wǎng)站上所用視頻蘸朋、圖片核无、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)第一時(shí)間告知藕坯,我們將根據(jù)您提供的證明材料確認(rèn)版權(quán)并按國(guó)家標(biāo)準(zhǔn)支付稿酬或立即刪除內(nèi)容团南,以保證您的權(quán)益!聯(lián)系電話:010-58612588 或 Email:editor@mmsonline.com.cn炼彪。

- 暫無(wú)反饋
編輯推薦
- 汽車輕量化驅(qū)動(dòng)下的零部件加工應(yīng)用專題
- 高性能銑刀實(shí)現(xiàn)高精加工生產(chǎn)技術(shù)專題
- 航空航天發(fā)動(dòng)機(jī)解決方案專題
- 高效齒輪加工生產(chǎn)技術(shù)方案專題
- 金屬加工液的性能不止?jié)櫥夹g(shù)應(yīng)用專題
- VisionChina上海機(jī)器視覺(jué)展會(huì)專題
- 智能切削刀具在汽車行業(yè)應(yīng)用專題
- 數(shù)控加工中心提升生產(chǎn)質(zhì)量技術(shù)專題
- 光學(xué)掃描測(cè)量解決方案技術(shù)專題
- 工業(yè)轉(zhuǎn)型下的柔性生產(chǎn)技術(shù)專題