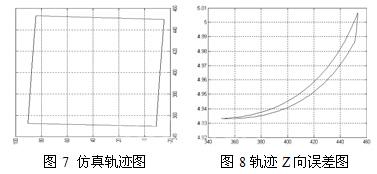
摘 要:通過6R機(jī)器人軌跡偏移分析缤底,對機(jī)器人關(guān)節(jié)間隙進(jìn)行建模仿真顾患,重現(xiàn)了實(shí)際繪制軌跡偏移。確定跡偏移原因个唧,指導(dǎo)機(jī)器人結(jié)構(gòu)設(shè)計改進(jìn)江解,提高機(jī)器人精度。 Abstract:Analsys the trace offset of the 6R robot,build the model of joint clearance,according to the sim..
 機(jī)器人
機(jī)器人







")
")
")